| “DO THEY BOTH GO ROUND, MISTER?” |
| Scale-model designer Dave Milbourn offers some insights into the various methods used for controlling twin propellers. |
|
|
|
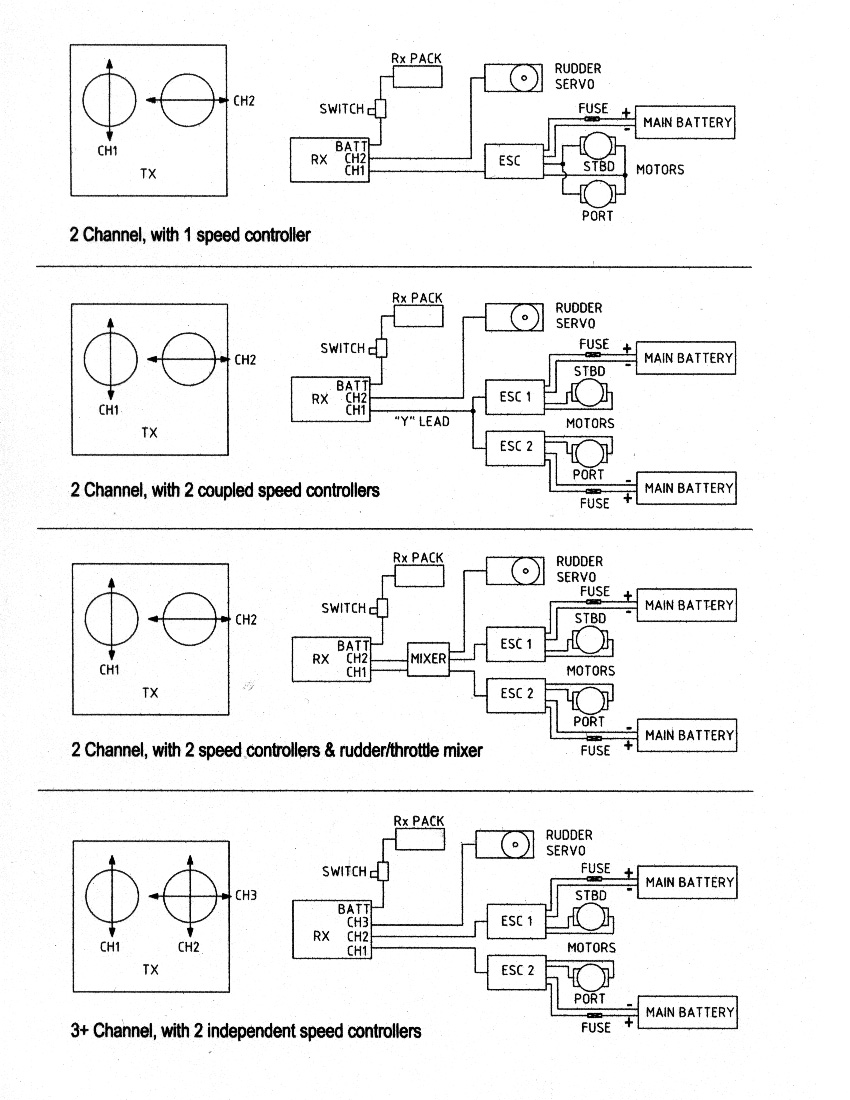
There is no doubt that the single-screw R/C model boat is the simplest form of the powered genre. Quite apart from the added complications of building a multi-screw boat, the modeller needs only to purchase, fit and maintain one of everything e.g. motor, shaft, coupling, speed controller etc. If building an exact replica of a twin-engined boat isn’t for you there’s no reason why you shouldn’t adapt the model below the waterline to use a single prop instead. Glynn Guest’s simple balsa-and-card models of warships are one of the best examples of this approach to design, and their popularity demonstrates that not everyone wants or needs to build more complex models. This philosophy doesn’t stop there; I wonder how many modellers have built a Huntsman or Perkasa without realising that the full-size craft had respectively two and three props. |
|
If you balk at the idea of not having two props on a scale model of a twin-prop boat then one approach is to fit a single motor which is geared to two shafts/props. For a “performance” model this would have some advantages, as geared drives are usually more efficient than direct drives. One might alternatively fit two motors connected to the same speed controller, although some care would be required to ensure that the motors were evenly matched. For slower scale models, however, the use of two independently controlled motors can greatly enhance manoeuvrability by taking advantage of asymmetric thrust. Let’s consider first of all the mechanics of how a boat turns. |
|
|
|
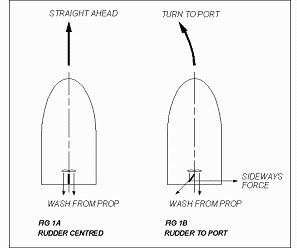
In Fig 1A, the rudder is centred and the propeller is pushing the water straight back over it. The only thrust force acting on the model is in line with its direction of travel so the boat will move straight ahead. Fig 1B shows the rudder turned to port. Some of the wash from the prop is now deflected “off course”, producing a sideways force on the rudder. We now have two thrust forces acting on the model; one pushing it forward and another tending to push the stern towards the starboard side. The result is that the forward speed will drop very slightly and the boat will turn to port. Quite how much the boat turns depends on the amount that the rudder is deflected and the speed of the prop-wash over it. OK – so it also depends on the size of the rudder but you’re not about to dive into the water with a hacksaw and file to change that, are you? Dead simple so far, so let’s double the number of rudders and props. |
|
|
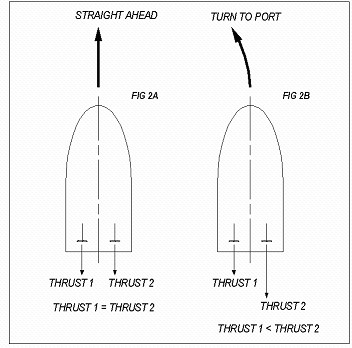
| Fig 2A shows our twin-screw model at full-ahead – assume the rudders are centred. So far it looks just like Fig 1A but things are not as simple as they seem. The props are no longer on the centre-line of the model so any thrust they produce will also have a turning effect (or “moment”) about the boat’s vertical axis. It’s only when the props are producing the same amount of thrust that these turning forces are balanced out, and the model will travel straight ahead. If you slow down one of the props (Fig 2B) the net effect will be to turn the boat slowly towards the slower prop. If that sounds clumsy then think of a rowing boat; if you pull harder on one of the oars then the boat will turn away from that oar. It should be noted that these forces are in play regardless of the position of the rudders. |
|
As I mentioned earlier, the rudders have a decreasing effect on the rate of turn as the speed of the water flowing over them is reduced. This explains why boats don’t steer as well when going astern, because the wash from the props is moving away from the rudders instead of over them. Those who can remember the first time they tried docking a model in a steering competition will know how embarrassing this can be! The beginners’ technique seems to be to slam the rudder hard-over, stab the throttle and pray you’ve got them both in the right direction. If you can harness the asymmetric thrust effect from twin props then the rudders become almost irrelevant for slow-speed manouvering. On full-size vessels this is usually done by having the two throttles side-by-side on the same binnacle. They can then be moved together for altering the speed of the boat, or “split” for the sort of effect described above. We are not, however, dealing with the big ‘uns here. |
|
|
| Fig 4 shows the R/C equivalent of the controls available to a full-size vessel’s skipper. The LH stick controls the electronic speed controller (ESC) for the port motor while the RH stick controls the starboard one. Incidentally, it is usual for twin props to be set-up as per Fig 3, with the starboard prop rotating clockwise and the port anticlockwise when viewed from the rear. It is also convention – at least among right-handed skippers – to use the lateral movement of the RH stick to control the rudders. Many modellers replace the ratchet on the LH stick with a self-centring spring, so that both sticks return to neutral in both planes when you release them. Usually a call to the distributor of your R/C gear will elicit the few components necessary to do the job – often for little more than the cost of postage (thanks, Amerang!) You will now have direct and fully independent control over both motors, as well as being able to apply any amount of rudder control desired. This independent control of the motors is often referred to as “tank steering” because it mirrors the way a tank-driver controls the tracks of his vehicle to steer it. It does have two drawbacks; you will have spotted that it requires a 4 or 6 channel transmitter i.e. one with two dual-axis sticks, and it demands an awful lot of practice and concentration to make the model do what you want it to. If you’re the sort of person who can pat the top of your head with one hand while rubbing your tummy at the same time with the other, then tank-steering is probably the ultimate in controlling your model boat. What about the rest of us, though? |
|
|
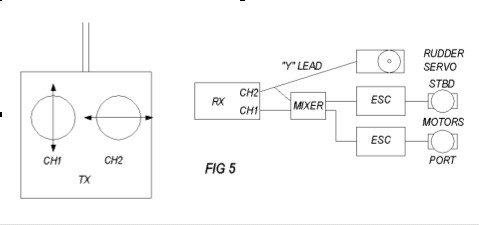
| Fig 5 shows the installation of a typical mixer unit. This is an electronic device which is fitted on board the model and is connected to both the rudder and throttle outputs from the receiver. It draws its power from the receiver pack and is typically no larger than a receiver. Quite how it works is a mystery to me – something to do with a microprocessor, I gather – but it senses signals from both the throttle and steering outputs and automatically slows down the motor on the inside of the turn dictated by the steering command. There are two types of mixer available. One will go as far only as stopping the inboard motor at “full rudder” (a 50% mix) whereas the other will actually put the inboard motor into full reverse (100%). This latter enables a model to spin round in its own length. In practical terms a long, thin model such as a warship or submarine would be best suited by a 50% mixer, whereas tugs and other workboats would probably be better off with the Full Monty job. Beware of earlier units, however. Some of them actually worked against the rudder command when going astern so do check before you part with any money. |
|
|
|
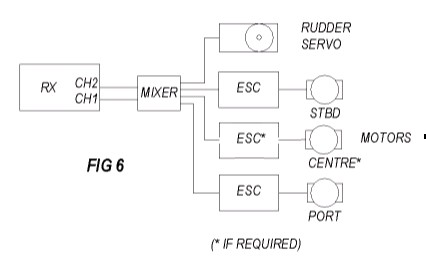
The ACTion Marine Mixer which I personally favour works correctly in both forward and reverse, and it has a couple of useful features which you might wish to note (See Fig 6). There is no need to buy and fit a Y-lead here, as the mixer has a “straight-through” connection which enables you to plug the rudder servo into the mixer itself. It also has a straight-through (unmixed) output for use where a model has a third motor installed along the keel-line and which doesn’t require mixing e.g. a model warship. Contrary to popular mythology, you don’t need a university degree to set up a mixer in your model. I have used both the Hunter Systems and ACTion units and found that both worked fine if you follow the detailed instructions closely, in the order given. It is useful if you have a couple of spare servos to assist in the initial setting-up procedure on the bench before the mixer is fitted into the model. It may seem rather obvious but you should ensure that you use speed controllers of the same type and current-rating and take care that the motors are as near to identical in performance as you can reasonably find. This advice applies equally to models fitted with “tank steering”. In respect of power supplies, I have used separate packs for each motor/ESC in some models and run both motors from the same battery in others. The latter seems to make more sense as it side-steps the risk of one pack running down faster than the other and mucking up your steering that way. The only slight problem I have ever found was when one motor seemed to run up to full-speed quicker than the other on the bench. By the time the model was in the water, however, it was impossible to notice any effect on the handling. |
|
Mixers have two main advantages over tank-steering; there is no need to buy a 4 or 6 channel radio to enjoy the benefits of controlling twin motors, and they do take the pain out of stirring the sticks. As my friend Lawrie White says, however, they will always mix the rudder and throttle commands together irrespective of whether or not it is actually the most appropriate command for the situation. You simply have to get to know how your model responds to given commands. I understand that many modern computer radios include the facility to program in a “mix” between any two channels and also to adjust the amount of mix applied (e.g. 0% - 100%). I don’t have one of these sets so I can’t advise you any further about them – save to say that they are much more expensive than the non-computer types, whereas an on-board mixer unit will cost you only around £30 - £40, built and tested if you require it. |
|
So the BIG QUESTION is “which is best for my particular model?” I don’t personally think that the model matters half as much as the builder/skipper. I suspect those who have mastered the black art of tank-steering would never dream of using a mixer, while those whose thumbs don’t work like that are probably better off with one. I count myself firmly in the latter group!!
(Article first published in
Model Boats magazine)
|