The good news is that FLJ's P44 units work a treat for operating the Puffer winch motors. The tiny dead-band problem I had with modified servos has been overcome by removing the circuitry and just leaving the motors.

Because one may wish to lower the hoist whilst raising the boom, a relay prevents conflicting signals being sent to the motor driving the winch mechanism. (I tried to demonstrate this in the video but it's virtually impossible to spot!)

Now the bad news.
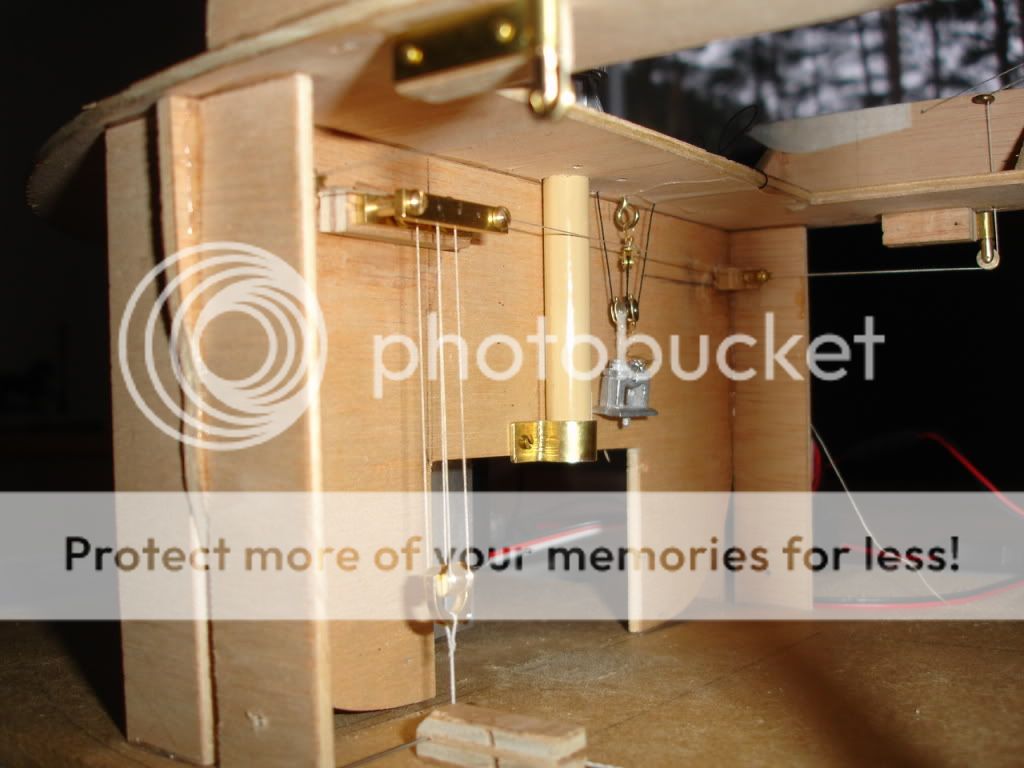
After the success of using a weighted pulley system to maintain gentle tension on the secondary (dummy) line for raising the boom (shown, still in prototype form, on the right in the next picture), I made a similar system to replace the crude lengthy pieces of elastic which I was using to maintain tension on the lines used for lateral movement of the boom.
Knowing that a greater length of thread was involved, I increased the number of sheaves from three to five.

The video demonstrates the extent of my stupidity!!

The two outer sheaves in the upper block don't count, so it's a three sheave system!
I'm now in a quandry. Do I accept that I can't raise the boom quite as far as I had hoped and stick with the rather lengthy, horizontal, piece of elastic to maintain tension (I had hoped to use a spring) or do I start again using an extra pair of sheaves?
The system already has a total of nine!
I strongly suspect that, with any extra sheaves, more spring tension will be required to prevent transient slackness in the thread and this could put too much strain on the system when the boom is fully raised. My inexperience is getting the better of me!
Finally, the ugly:

Given half a chance, she'll lick you to death!
(Beauty is in the eye of the beholder!)
Mike



 Author
Topic: Caldercraft Northlight Puffer with working Derrick Crane (Read 110279 times)
Author
Topic: Caldercraft Northlight Puffer with working Derrick Crane (Read 110279 times)