Update:

Bit of trial and error engineering but works quite well actually.
I wanted to check for room for possible faster stepper motors but those I found are far less accurate so I need to think it through.
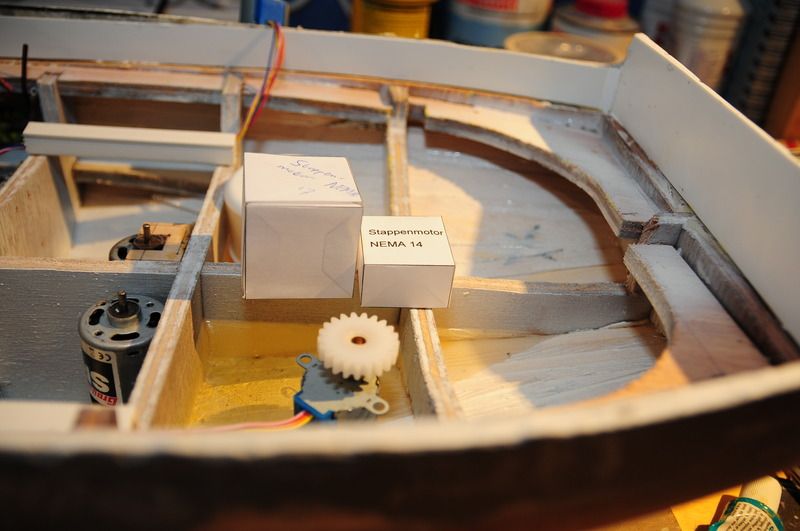
Put the different options alongside each other for reference.
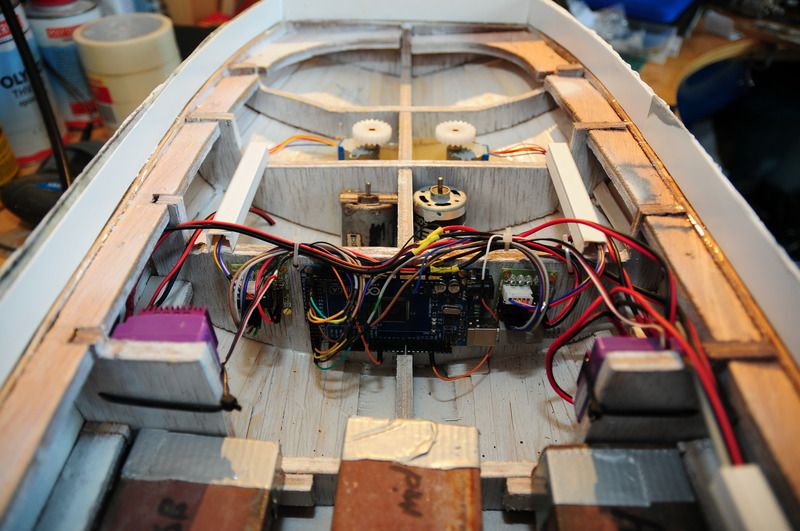
Today I hooked both teh 2 ESC's and the stepper motors up to the rear Arduino and to there own power supply running 2 sets of wire to the central computer to be hooked up there.
I connected the battery to the system to see if the lights would go on, indicating proper power connections.
Turned out to be working fine, now I need a program so I can control things.
In the bottom of this photo one can see the temporary connection of the power to the rear and the UBEC (the universal version of the BEC on ESC's).
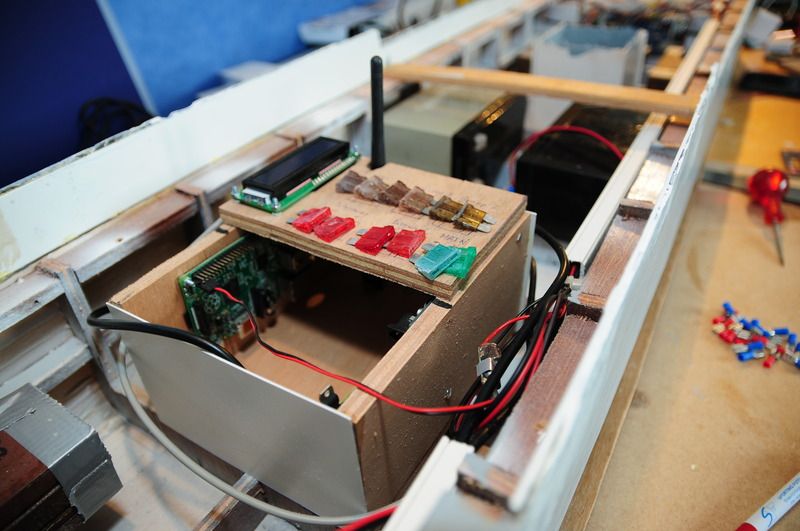
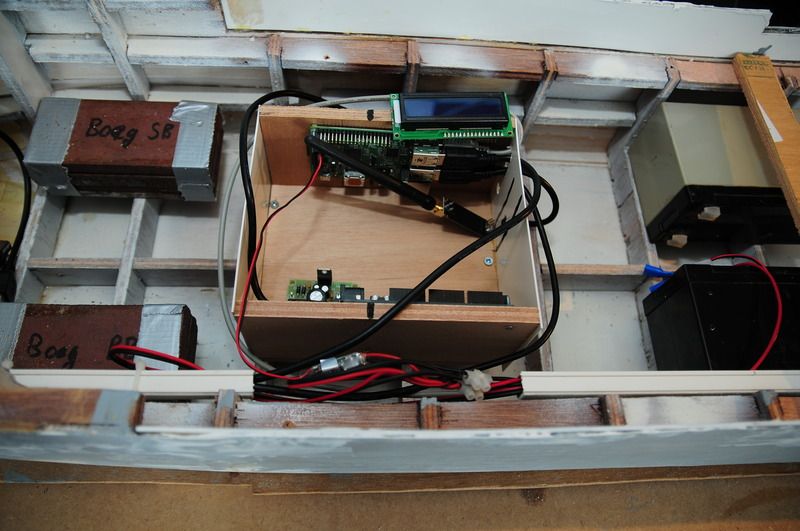
I also started working on the cover for the central computer housing a LCD screen with 2 rows of 16 characters (screen will show messages like "computer powered up" or malfunctions of any kind), a hole to put the main antenna through and I started working on a fuse design.
The Pi and Arduino's will have a 7,5A group which is more then enough for this application.
The main engines will share 1 10A group which is enough for 1 blocking engine.
The bowthrusters will share 1 10A group.
There will be 2 more 7,5A groups for all other equipment, including the 2 steering stepper motors.
Greetings Josse




 Author
Topic: Re: Diving support vessel Well Enhancer scale 1:75 - v2 (Read 73886 times)
Author
Topic: Re: Diving support vessel Well Enhancer scale 1:75 - v2 (Read 73886 times)